¿Qué es un radar?
El radar es un sensor que se utiliza principalmente para tres cosas diferentes que son; medir la velocidad, detectar y localizar objetos en el mapa. Su nombre se debe al acrónimo de las palabras en ingles «radio detection and rangin» o bien en español «detección y medición de distancias por radio».
¿Cómo funciona el radar?
Este dispositivo funciona principalmente con un emisor y un receptor. El primero se encarga de generar ondas de radio de alta intensidad y frecuencia, cuando la señal encuentra algún objeto esta rebota generando un eco el cual regresa al mismo punto donde fue enviada la señal para que el receptor procese e interprete los datos generados como son: el tiempo y el efecto Doppler que se genera (entre más alejado este el objeto menor será la frecuencia y mientras más cerca este, proporcionalmente igual).
Como observación cuando el emisor genera la señal este se apaga hasta que el receptor capte los datos, esto se hace de esta forma para que el sistema no se sature de señales y cause un descontrol.

Partes internas del radar
El radar cuenta con varias partes internas y cada una de ellas es primordial para su funcionamiento.
Generador de frecuencias
Se encarga de generar la frecuencia exacta con la cual el sistema se sincronizara o trabaja y determina cuando trabaja el transmisor.

Transmisor y modulador
Este genera una señal de y la transmite hacia el terreno a sensar. La señal que emite es de alta frecuencia para que no existan interferencias con otras señales.
El modulador se encarga de ajustar la señal ya sea en amplitud, frecuencia o fase para el funcionamiento sea más adecuado para medir la distancia.

Duplexor
Este se encarga de encender y apagar el transmisor y el receptor, según el proceso en el cual se encuentre el sistema.

Receptor
Se encarga de recibir todas las señales del entorno, filtrando las ajenas al sistema y cuando capta la indicada la amplifica para un procesamiento adecuado.
Procesador de señal y datos
Procesa la señal de los ecos recibidos y convierte los datos obtenidos para poder mostrar en el display la distancia y la velocidad según sea el caso.
Display
Es la parte visual de este sistema en la cual nos indica si existe algún objeto en el rango de medición del radar.

Tipos de radares
Dentro de los tipos de radares existen principalmente dos clasificaciones diferentes, los de onda pulsante y los de onda continua.
Pulsante
Estos son conocidos por radares marinos, ya que comúnmente se pueden encontrar en los buques mercantes, este radar transmite una señal de alta frecuencia de forma pulsada, después de mandar un pulso existe un tiempo de espera para verificar si regreso algún eco de la señal. Estos pueden detectar dirección, distancia y velocidad de cualquier objeto.
Dentro de esta categoría podemos encontrar 3 tipos diferentes según la frecuencia de onda
- PRF alto (mayor a 30Khz),
- medio (entre 3 y 3 Khz)
- bajo (igual o menor a 3Khz).

De onda continua
Estos radares transmiten la señal de forma ininterrumpida, basan su funcionamiento en el efecto Doppler y podemos encontrar diferentes clasificaciones.

Otras formas de clasificar a los radares
Tomando como base principal que solo existen los radares pulsantes y los continuos, existen otras formas de clasificarlos. Y aunque utilizan alguno de los tipos de funcionamiento anteriores tienen algunas variaciones que los clasifican en diferentes ramas. Por ejemplo por el numero de antenas, por su forma de onda, por la forma que identifican los objetos o simplemente con que finalidad se utilizan.
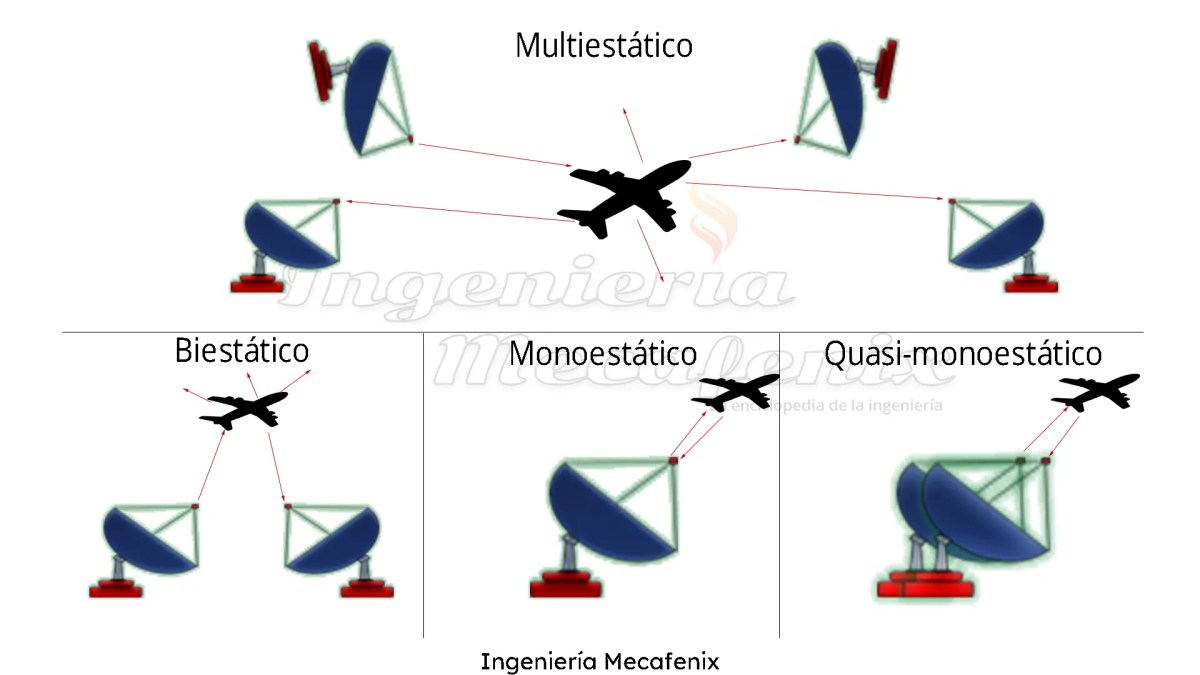
Número de antenas
- Biestático: tiene dos antenas, una para emisión y otra para recepción
- Monoestático: Solo tiene una antena para emisión y para recepción
- Quasi-monoestático: Las antenas están juntas a simple vista parece que solo tuviera una antena pero tiene dos.
- Multiestático: Tiene varias antenas y procesa la información de cada una.
Forma de onda
- Sin modular: Esta basado en el efecto Doppler y solo es capaz de calcular la velocidad del objeto.
- Modulado: El sistema transmite una señal dentro de un rango de frecuencias reconocidas por el sistema.
Por identificación de objetivo
- Radar primario: Este se encarga de detectar el blanco:
- Secundario: Se utiliza principalmente para la identificación de aeronaves.
Por su finalidad
- De seguimiento: Creados para el seguimiento automático de objetos.
- De búsqueda: Utilizados para la detección de blancos en zonas de interés.
Artículos recomendados para ti
Si te gusto nuestro post no dudes en visitar nuestro otros artículos donde te explicamos los temas de una manera fácil y sencilla de entender




